
Kõik iLive'i sisu vaadatakse meditsiiniliselt läbi või seda kontrollitakse, et tagada võimalikult suur faktiline täpsus.
Meil on ranged allhanke juhised ja link ainult mainekate meediakanalite, akadeemiliste teadusasutuste ja võimaluse korral meditsiiniliselt vastastikuste eksperthinnangutega. Pange tähele, et sulgudes ([1], [2] jne) olevad numbrid on nende uuringute linkideks.
Kui tunnete, et mõni meie sisu on ebatäpne, aegunud või muul viisil küsitav, valige see ja vajutage Ctrl + Enter.
Kuidas embrüo emakoesse "hammustab": implantatsiooni mehaanikat inimestel filmiti esimest korda reaalajas
Viimati vaadatud: 23.08.2025
 ">
">Barcelona (IBEC, Dexeus Mujer) ja Tel Avivi teadlased on esmakordselt reaalajas ja 3D-s näidanud, kuidas inimembrüo kinnitub "emaka karkassile" ning sõna otseses mõttes tõmbab ja restruktureerib ümbritsevat kude. Selleks lõid nad deformeeritava ex vivo platvormi (kollageen/ECM geelid) ja rakendasid veojõumikroskoopiat otse elusatele inimese ja hiire embrüotele. Peamine leid: jõudude muster on liigispetsiifiline ja embrüod ise on mehaaniliselt tundlikud: nad reageerivad välistele mehaanilistele signaalidele tsütoskeleti restruktureerimise ja kasvu orientatsiooni muutmisega.
Uuringu taust
Implantatsioon on inimese reproduktsiooni "pudelikael": just selles etapis ebaõnnestuvad nii loomulik viljastumine kui ka IVF-katsed kõige sagedamini. Samal ajal on inimese implantatsioon interstitsiaalne: embrüo ei "kleepu", vaid kinnistub täielikult endomeetriumisse – biokeemiliselt ja mehaaniliselt keeruline protsess, mida kuni viimase ajani inimeste elusorganismides peaaegu ei täheldatud. Seetõttu jäi adhesiooni ja invasiooni mehhanism "musta kasti" valdkonda ning järeldused tehti sageli kaudsete markerite või loommudelite andmete põhjal.
Klassikaline implantatsioonibioloogia on suuresti tuginenud hiirele, kuid liikide vahel on põhimõttelisi erinevusi, alates blastotsüsti orientatsioonist kuni implantatsiooni sügavuse ja rakuliste jõudude mustrini. Hiirtel on implantatsioon "pealiskaudsem", eelistatud koe nihkumise suundadega; inimestel on see selgelt invasiivne, embrüo ümber multifokaalsete veojõududega. Need erinevused viitavad sellele, et hiiremudel ei ole alati inimestele skaleeritav, eriti mehaanika osas. Oli vaja inimese embrüo otseseid vaatlusi deformeeruvas keskkonnas.
Tehnoloogiline läbimurre sai teoks tänu deformeeritavate 2D/3D maatriksite (kollageen/ECM) ja veojõumikroskoopia kombineerimisele pikaajalise kõrgsagedusliku pildistamisega. See „kunstlik emakas“ võimaldas sõna otseses mõttes näha ja mõõta, kuidas embrüo ümbritsevat kude tõmbab, ümber kujundab ja „puurab“ – ning kuidas see reageerib välistele mehaanilistele signaalidele (mehaaniline tundlikkus). See avab tee uutele kriteeriumidele implantatsioonipotentsiaali hindamiseks ja embrüosiirdamise tingimuste täpsustamiseks.
Konteksti rakendatakse: kui keskkonna mehaanilised omadused ja embrüonaalsete jõudude muster on seotud implantatsiooni edukusega, siis IVF-is on võimalik sihipäraselt valida maatriksi jäikust/koostist, võtta arvesse ülekande ajaaknaid ja isegi kasutada "jõu" mõõdikuid täiendava valikumarkerina. Paralleelselt aitavad sellised platvormid selgitada varajaste raseduse katkemiste osakaalu, kui biokeemia on "normaalne", kuid adhesioonimehaanika mitte. Kõik see muudab inimese implantatsiooni otsesed 3D-vaatlused mitte ainult ilusaks videoks, vaid ka uueks tööriistaks reproduktiivmeditsiinis.
Miks see oluline on?
Implantatsiooni ebaõnnestumine on üks peamisi viljatuse põhjuseid ja kuni 60% spontaansetest raseduse katkemistest. Vaatamata IVF-i biokeemilistele edusammudele jäi selle protsessi mehaanika inimestel nn mustaks kastiks. Uus lähenemisviis võimaldab meil näha embrüo implantatsiooni jõude ja trajektoore ning annab aluse embrüo valiku ja siirdamise tingimuste parandamiseks.
Kuidas seda tehti
Teadlased panid kokku "kunstliku emaka" - pehme, läbipaistva ja deformeeruva keskkonna, milles koetaoline maatriks nihkub nähtavalt embrüonaalsete jõudude mõjul. Järgmisena tehti kiudude nihete pidev mikroskoopia ja arvutuslik analüüs.
- 2D- ja 3D-platvormid: 3D-s kinnistatakse embrüo kohe maatriksisse (kinnitusetapp „mööda jäetakse“), mis võimaldab näha puurimist koe paksusesse.
- Kõrge "ellujäämis- ja läbitungimismäär" 3D-s: umbes 80% edukas sissetung (piiratud klaasi lähedusega).
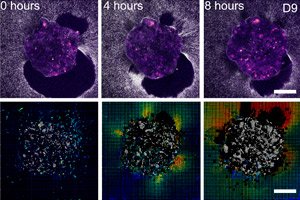
- Veojõukaardid ja digitaalne mahu korrelatsioon näitavad embrüo ümber toimuvate nihete amplituute ja suundi – sisuliselt jõu "jälge" aja jooksul.
Mis täpselt leiti (lühidalt ja punkthaaval)
1) Liigispetsiifiline implantatsioonimehhanism
- Inimene: embrüo sisestatakse maatriksi, luues mitu veojõudu ja moodustades enda ümber radiaalselt ühtlaseid nihkeid; invasiooni sügavus on kuni 200 µm.
- Hiir: embrüo levib peamiselt pinnal selgelt väljendunud peamiste nihkesuundadega.
2) Embrüo tajub keskkonna mehaanikat
- Välised jõud → vastus: inimese embrüos - müosiini ja suunatud raku pseudopoodide värbamine; hiirel - implantatsiooni/kasvutelje pöörlemine välise jõu allika suunas (PD-telje orientatsioon).
- Mehaaniliselt tundlikud markerid: hiirel YAP lokalisatsiooni nihked trofoblastides; kokkuvõttes viitab see mehaaniliselt tundlikule tagasisideahelale.
3) Implantatsiooni tugevuse ja edukuse vaheline seos
- Vähem kollageeni nihkumist → halvem implantatsiooni edenemine inimese embrüos.
- Integriinid - tugevuse "sidur": RGD peptiidi blokaad/Src inhibeerimine hiirtel vähendab implantatsiooni sügavust/pindala.
Kuidas näeb välja rakendamine?
- 2D- ja 3D-platvormidel moodustub embrüo ümber kasvav kiudude nihkumistest koosnev „halo“; veojõukaart pulseerib justkui embrüo „skanniks“ oma ümbrust.
- Klaasil moodustab inimembrüo lameda väljakasvu, kuid pehmes maatriksis jääb see sfäärilisemaks ja ulatub sügavamale – nagu eluskoes.
Mida see praktikale annab (väljavaated IVF-ile ja mitte ainult)
Idee on lihtne: implanteerimine ei ole ainult "retseptori keemia", vaid ka adhesiooni ja veojõu mehaanika. See tähendab, et saame optimeerida:
- Materjalide ja keskmise kõvaduse mõõtmine kultuuri/implantatsioonipotentsiaali testide ajal;
- Uued embrüovaliku markerid - põhinevad trajektooridel ja nihete amplituudil "nutika" maatriksi sees;
- Emaka treenimine/moduleerimine (nt õrnade mehaaniliste signaalide abil) adhesiooni parandamiseks ilma agressiivsete sekkumisteta.
Ettevaatust: ex vivo töö ei toimu "emakas". Kuid juba see fakt, et väline mehaaniline signaal muudab implantatsiooni orientatsiooni/telgede paigutust, avab tee embrüosiirdamise isikupärastatud tingimustele.
Piirangud
- Ex vivo mudel ei võta arvesse tegeliku endomeetriumi immuun-, hormonaalset ja veresoonkonna dünaamikat;
- Matrigeel/kollageen defineerib omaduste kogumi (jäikus, viskoelastsus, koostis), neid on keeruline ühe parameetri võrra muuta;
- Inimestega tehtud uuringute eetilised piirangud (kuni 14-päevane aken) piiravad pikaajalist vaatlust. Siiski suurendab kõrge kooskõla teadaolevate in vivo implanteerimisviisidega (interstitsiaalne inimestel vs pindmine hiirtel) mudeli usaldusväärsust.
Kokkuvõte
Inimese embrüo "tõmbab" ja "puurib" aktiivselt end emakoesse ning keskkonnast tulevad mehaanilised signaalid võivad selle käitumist ümber kujundada. Jõudude muster ja implantatsiooni strateegia on inimestel ja hiirtel erinevad – ja see võib selgitada, miks hiiremudel ei ennusta alati edukat implantatsiooni inimestel. Mehaanika on nüüdseks täieõiguslik tegija varajases embrüoloogias ja reproduktiivmeditsiinis.
Allikas: Godeau AL jt. Veojõud ja mehaaniline tundlikkus vahendavad liigispetsiifilisi implantatsioonimustreid inimese ja hiire embrüodes. Science Advances 11(33): eadr5199 (15. august 2025). DOI: 10.1126/sciadv.adr519